由英國牛津大學領銜的研究團隊研發出一種全新的軟體機器人,它們無需電子元件、馬達或計算機,僅靠空氣壓力就能運作。研究顯示,這種“無腦”機器人并不依賴中央控制系統或程序指令,而是通過自身結構與外界的物理作用實現運動與協調。相關研究5日發表在《先進材料》雜志上。
這一成果為發展具身智能開辟了新方向,也就是將決策與行為直接編碼在機器人的結構中,從“靠大腦控制的機器人”,發展到“身體本身就是智能系統的機器人”。這種新型機器人更高效、更節能,未來有望在能源有限、環境復雜的場景中實現自適應工作。
軟體機器人由柔性材料制成,擅長穿越復雜地形或操控易碎物體。該領域的一個重要目標是,將行為與決策機制直接寫入機器人的物理結構,使其無需復雜的感知和編程系統就能自適應環境。但如何讓這種自動化行為自然涌現,一直是一大挑戰。
許多生物體無需中央控制就能實現身體協調。研究團隊從自然界汲取靈感,設計出一種模塊化氣壓單元,能夠像電子電路中的電流一樣傳遞空氣壓力,并完成不同機械功能。根據氣流設置,這一單元可執行3種任務:像肌肉一樣在氣壓變化下運動;像觸覺傳感器一樣感知接觸變化;像閥門一樣控制氣流通斷。
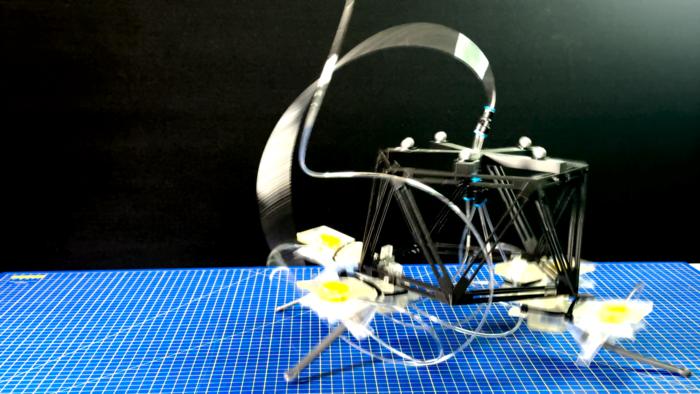
這些模塊猶如樂高積木,多個幾厘米大小的相同單元無需改變基本設計即可拼裝成不同機器人。團隊在實驗室組裝了鞋盒大小的桌面原型,能完成跳躍、震動、爬行等動作。在特定連接下,單個模塊可同時執行3種功能,只需持續施加氣壓,就能自主產生節律運動。當多個模塊連接在一起時,它們會自然形成同步節奏,而無需任何計算機控制。
團隊展示了兩種典型裝置:一種“搖動機器人”,能通過旋轉平臺自動將珠子分類;另一種“爬行機器人”,能感知桌面邊緣并自動停止,防止墜落。整個過程完全由機械反饋實現。這種協調行為不是預設指令的結果,而是由模塊之間的相互作用及其與環境的物理耦合自然產生。
本網站轉載的所有的文章、圖片、音頻視頻文件等資料的版權歸版權所有人所有。如因無法聯系到作者侵犯到您的權益,請與本網站聯系,我們將采取適當措施。